As I’ve stated in previous posts, sound decoders have drastically changed my approach to DCC consisting. In an ideal world, I want all movement controls (forward, reverse, braking, dynamics) within a consist to be controlled by a single throttle, and I want only the lights, horns and bell of the lead unit to respond when an operator selects these functions. Digitrax’s “universal consisting,” unfortunately, doesn’t allow function-controlled movements like braking to go to the entire consist. Also, if you reverse the direction of the consist, you have to rebuild the consist to control both movement, lights and sound with the new lead unit. This is not a big deal for trains that only run in one direction, but every single one of my trains is an “out and back” where the lead unit of a consist switches, sometimes several times in a session. Asking operators to rebuild the consist every time they switch the train’s direction is not ideal.
Moving to “advanced consisting” (decoder-aided consisting) solved many of these problems but not all. Using the “consist” tab in JMRI, I was able to use the directional lighting features built into my Soundtraxx Tsunami 2 decoders to set the lights on the end units in a consist to “respond to consist address” but only in forward or reverse, thus solving the challenge of only getting the end lights in a consist to illuminate. The horns and bell, however, cannot be set to only operate directionally using the consist controls, so I was stuck with picking one loco in the consist to respond to all the horn and bell commands… this works, especially if all units use the same horn type, but it bothered me a bit to hear a Nathan M5 from the trailing GP35 instead of the Nathan P3 from the leading GP38. When I posed this question to a group of Digitrax experts, one of them pointed me to this video from Soundtraxx where someone had figured out how to use “alternate sound levels” function in the Tsunami 2 decoders to get directional horns, so I had to give it a try. The video left a few steps out, perhaps because they were using “simple consisting” (same address), so I had to experiment a bit to figure out how to make it work with advanced consisting, but in the end, I was able to get the consist to perform [almost] exactly as I had hoped using the following method.
The Gist
Soundtraxx Tsunami 2 decoders have an “alternate sound mixer” designed to make it easy to select a new set of alternate sound levels with the press of a function button. Additionally, the “function mapping” in Tsunami 2 decoders allows you to set any function to operate automatically when the command station commands the decoder in “forward driving,” “reverse driving,” “forward driving,” or “forward standing” conditions. The trick is to set all the alternate sound levels to match the primary sound levels EXCEPT the horn and bell which are set to volume “0,” then use the function map to configure the alternate mixer to operate any time the decoder is moving in the trailing direction (forward or reverse based on how it’s sitting in the consist), and finally to set up the decoder to “respond to consist address” for horn and bell functions. When you set up the locomotives on the ends of the consist in this manner, it has the effect of silencing the horns and bell when the locomotive is trailing and not leading. Here are the steps in JMRI.
Step 1. Set the sound levels in the primary sound mixer
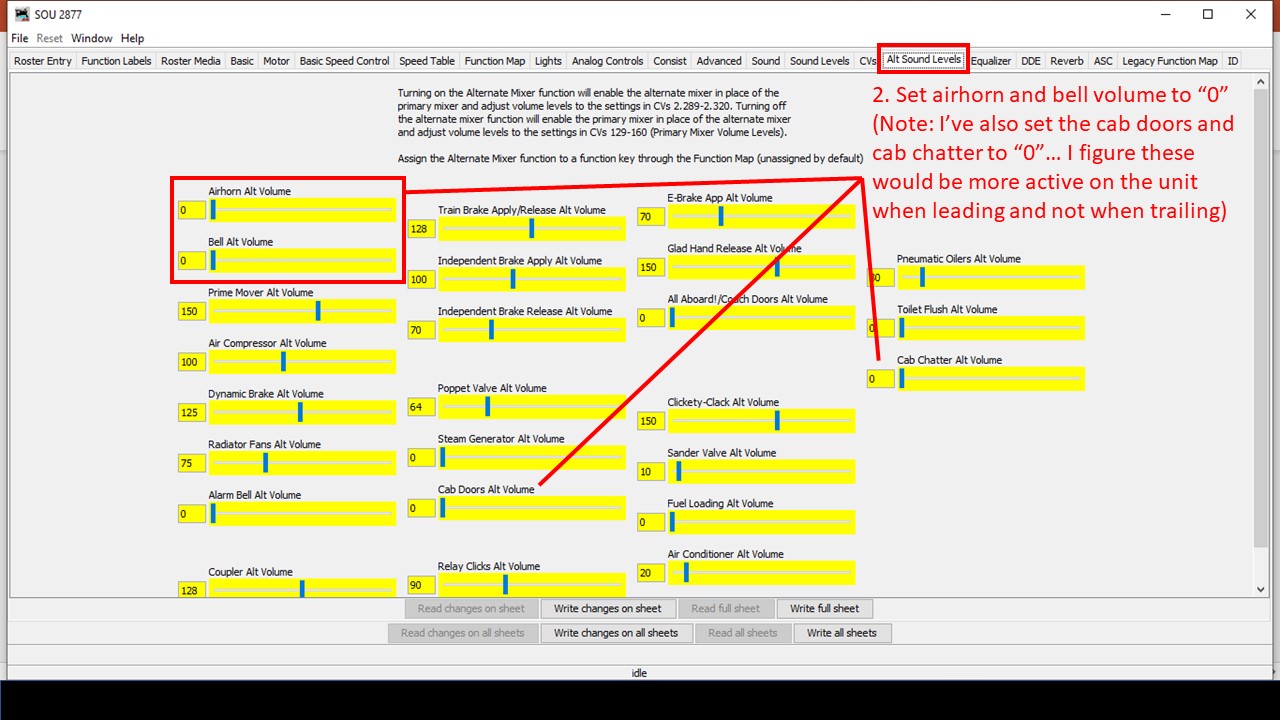
Step 2. Set the horn and bell to “0” in the alternate sound mixer
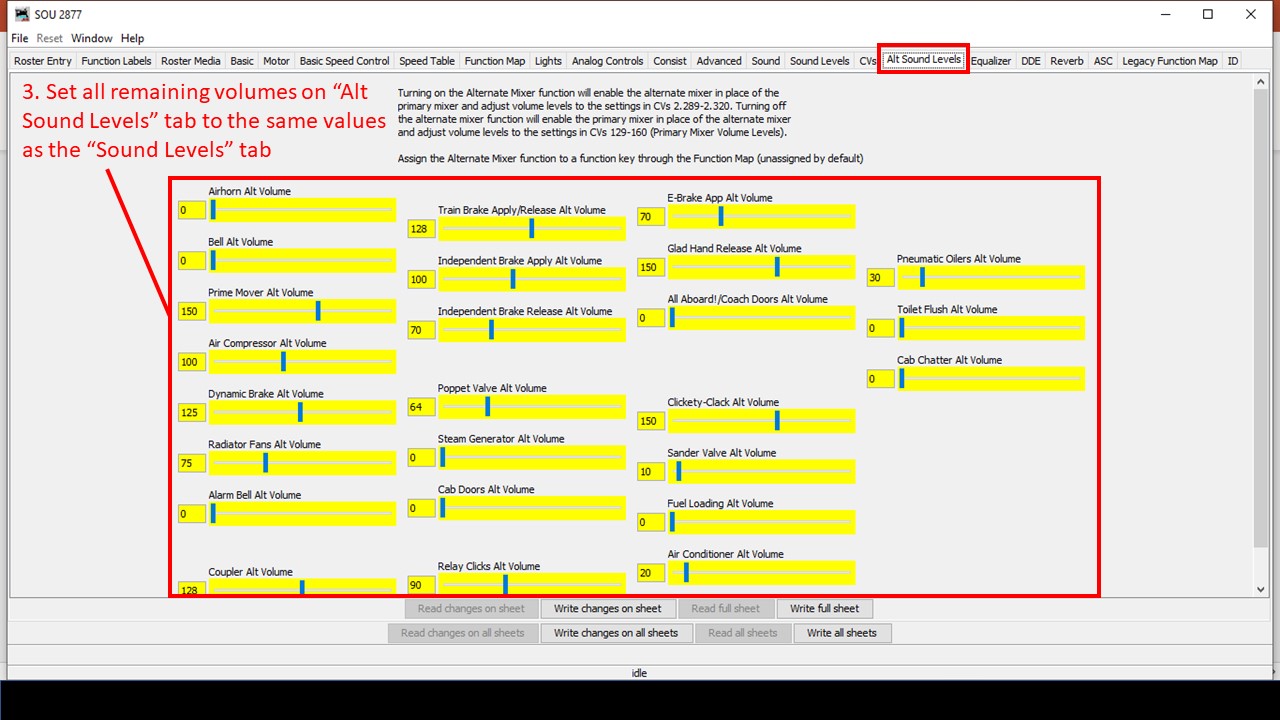
Step 3. Copy all other sound volume values from the primary to the alternate sound mixer
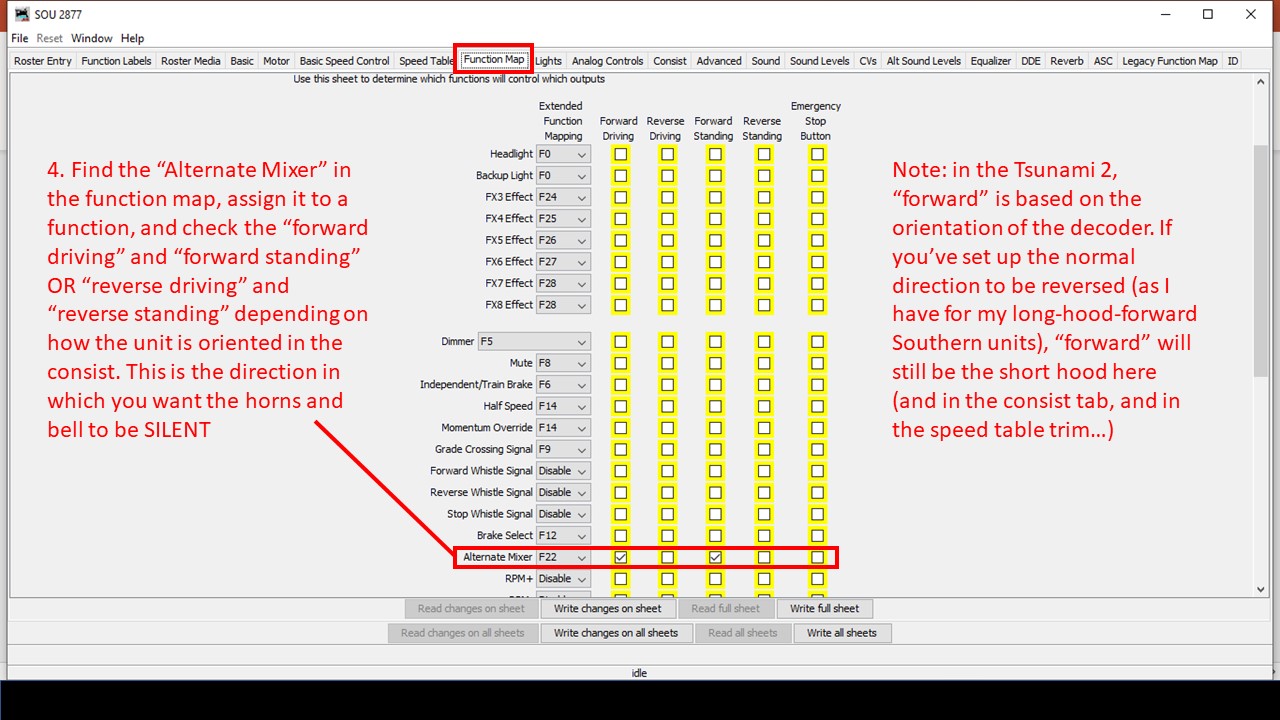
Step 4. Set up the “alternate mixer” to operate with forward or reverse direction (the direction in which it’s trailing in the consist)
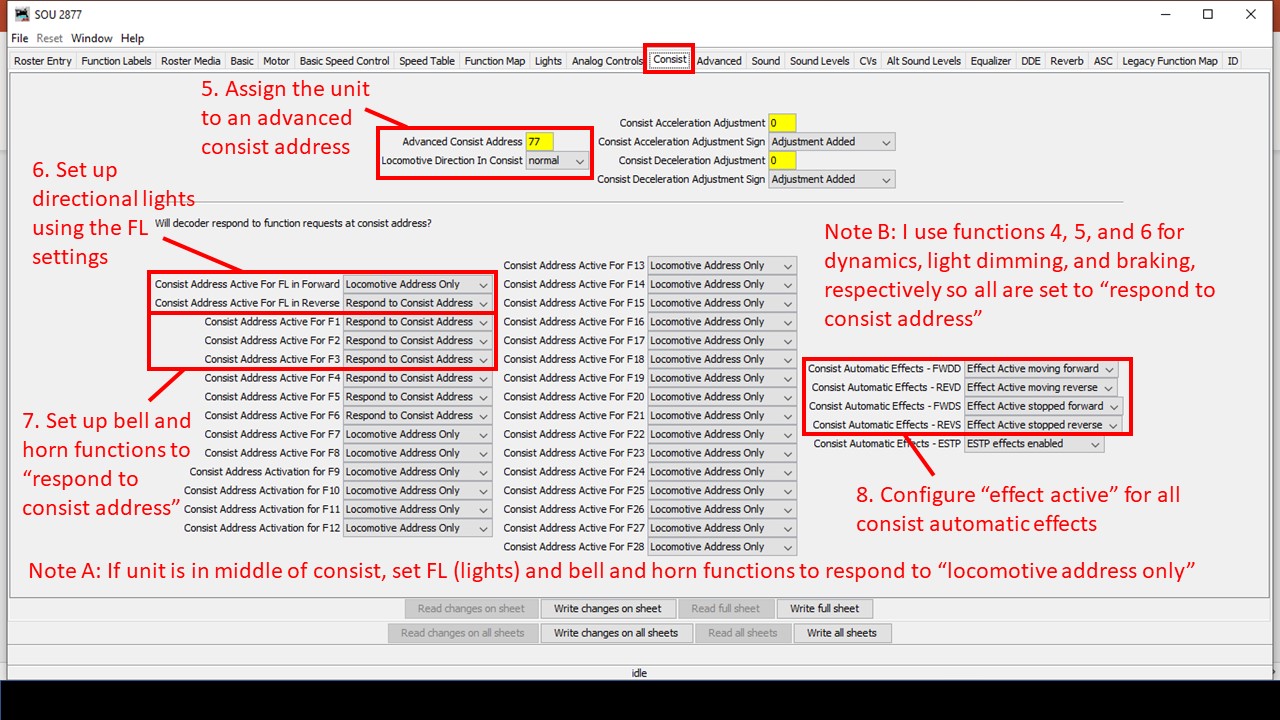
Steps 5-8. Set up the advanced consisting so directional lights and functions for horn and bells “respond to consist address” and enable the automatic functions
Some of the settings will depend on where the locomotive is in the consist and whether or not its on the end. For a locomotive in the middle of the consist, you can either set the decoder’s light, horn and bell functions to “locomotive address only” in the consist tab, or you could place check marks in all four columns in the function map (forward driving, reverse driving, forward standing, reverse standing) so only the alternate mixer with zero volume for bells and horn are used. If you change the orientation of the locomotive, you may need to change the FL settings in the “consist” tab and swap from “forward” to “reverse” check marks in the function map. Also, if you’re using a locomotive on the end that doesn’t support an alternate mixer (like the Soundtraxx Econamis I have in some locomotives), then you’ll need to pick just one of the locomotives to “respond to consist address” to provide the horn and bell for the whole consist and disable the directional checks in the function map.
That’s it! Now when you run a throttle using the advanced consisting address, the lights on the ends will be directional, AND only the horn and bell of the leading unit will respond to the throttle’s horn and bell functions no matter which direction you’re running. Click on the video at the top of the page to see this in action, and if you’ve got some even better tips and tricks for this, please leave them in a comment below!
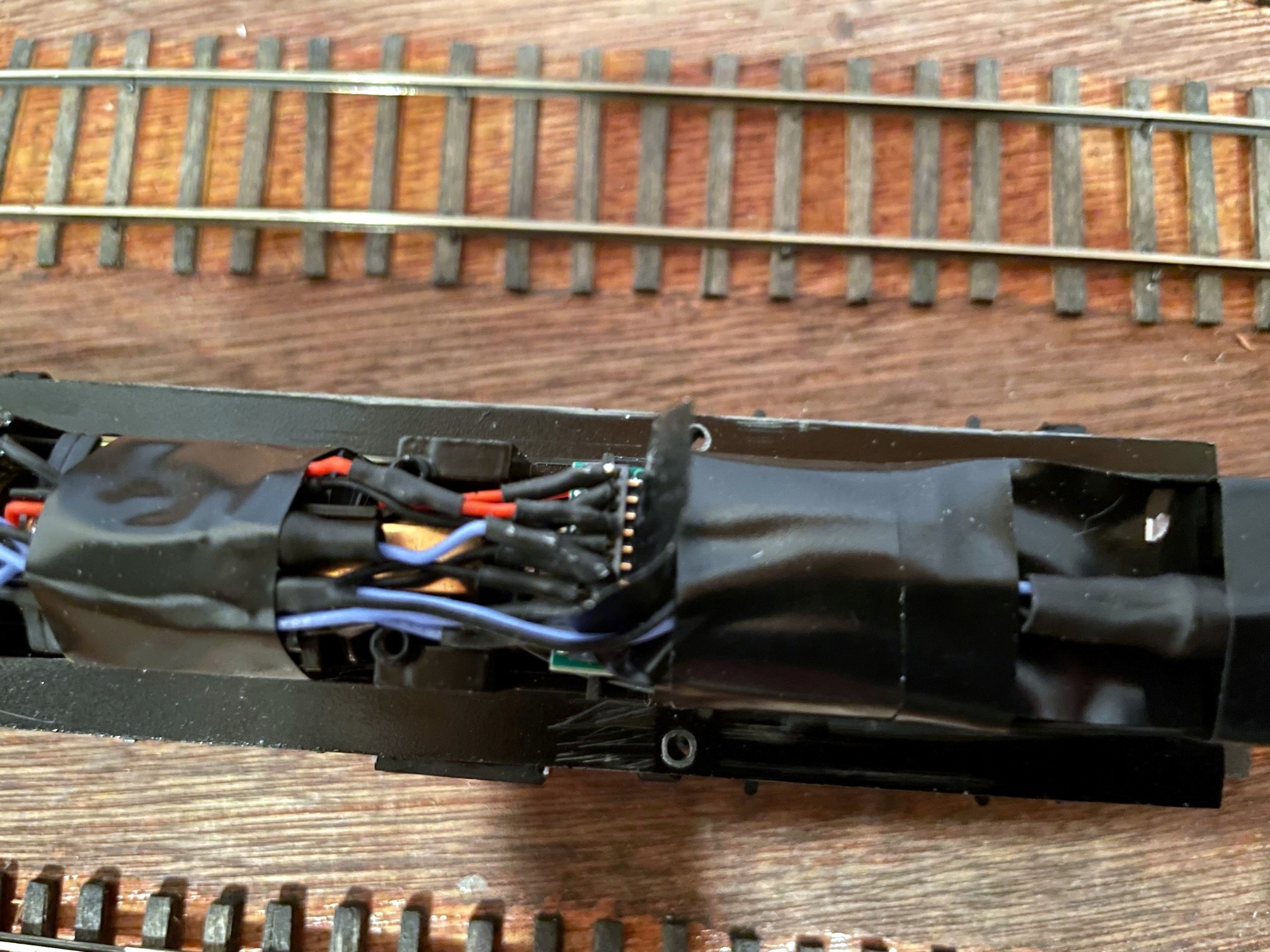
These two were my first consist of Tsunami 2s and taught me a lot of lessons on speed matching
First, beware someone with 6 months of experience offering you advice… ok, if you’re still reading, I like your sense of adventure! I steered clear of sound decoders for years because I knew as soon as I started, I would need to upgrade the whole fleet to be happy, and it was going to be a huge investment in money and time. Other than a one-time fling with a Digitrax Soundbug many years ago, I really dipped my toe in the water when I picked up a couple of locomotives sound equipped from the factory a few years back, an Athearn GP38-2 with Soundtraxx Tsunami and an Atlas C420 with ESU LokSound v4. I tried installing one cheap drop-in sound decoder in an Athearn/MDC RS3, and that was not a positive experience, so I stopped for a while. Finally in February, I decided it was time to figure this out, so I did a bit of research and dove in! Here are a few things I’ve learned in the first 6 months and 12 sound decoder installs.
It’s not as tough as it looks. Not gonna lie, I’m the adventurous kind of person who doesn’t mind taking a hacksaw to a $200 locomotive, but I was SUPER intimidated by installing sound! What I found is once you’ve got a few basics down, it’s only a little more difficult than installing a standard decoder (which isn’t that difficult). The toughest part is finding a good space inside the locomotive to mount the speaker(s) while still leaving room for the decoder and other vitals. I’ve only destroyed one sound decoder in the process (more on that later), and I have gone back and redone some of my first installs based on lessons learned over time–extra time but no biggie.
You get what you pay for. Big surprise, this maxim applies to sound decoders too! I tried to go cheap at first and found a “great deal” on a one-piece drop-in decoder for an Athearn RS3. It even came with a speaker on-board–what a deal! Installation was very easy, but to me it sounded like a screeching lemur with its tail caught in a coffee grinder… the horn was tolerable, but the rest of the sounds were painfully inadequate and unconvincing. I tried building a baffle around the thin piece of plastic acting as the speaker, but it only improved the bass performance slightly with no improvement to the actual sounds. In the end, it was a waste of money and time, and that decoder spent most of its short life with the sound switched to “off.” If you love the screeching lemur decoders, I’ve got two more I’ll sell you cheap!
Following that experience but still wanting to save a LITTLE money, I tried out the “Econami” decoders from Soundtraxx. These were about twice as much as the screeching lemur decoder but still only 2/3 the price of a full-fledged sound decoder, so it seemed like a good place to start. The Econami was lightyears ahead of the screeching lemur in terms of sound quality (same basic sound quality as the Tsunami 2 series), and it had all the features I thought I wanted. After I equipped a few locomotives with Econamis, I splurged on my first Tsunami 2, mainly because the Econami didn’t have the EMD 567 turbo sound I needed for a GP30. Once I played with the “extra features” I didn’t think I cared about, I found that those features were worth the extra cost, at least in my “lead” locomotives. So what’s the difference? First, I’m very happy with my Econamis and would still highly recommend them for “in the consist” locomotives that use the prime movers available on the decoder (Alco 244, EMD 567 non-turbo, EMD 645 turbo, EMD 710 turbo, GE FDL-16). The prime mover sounds are, indeed, the same as the sounds on the Tsunami 2s. However, the Tsunami 2s have more noticeable depth and variety to the secondary sounds like valves, compressors, radio chatter and even toilet flushes. The biggest difference I’ve found is how the sounds correspond to the throttle and loads if you take the time and effort to really configure them which I’ll talk about later.
The tight quarters inside an Athearn RS3–the decoder is under the cab to the right side
Sound decoders are tough, but you can destroy them. I’ve found sound decoders to be tougher than they look, but they’re far from indestructible. They’re designed with either wires or soldering points that make them easy to connect to your locomotive, and I haven’t destroyed one with a soldering iron yet. However, sound decoders pack a LOT onto a little board, so the individual components can be small and fragile. I found this out with an Econami decoder I installed (poorly) in an Athearn RS3. I got everything to almost fit, but I needed just another millimeter of clearance, so I pressed the decoder down. Well, because of my poor choice of installation location, it forced a metal protrusion of the frame into one of the board’s components, and that was that! No more blue light, no more sound, no more movement, lots of heat where there shouldn’t have been… toast. So, be gentle with them, and don’t do anything to make direct contact with the frame or to put pressure on any single component. Expensive mistake but valuable lesson!
Take your time arranging the components in the install. The one decoder I fried was a victim of poor component placement in the locomotive. Usually the decoder sits above the motor like any other decoder, but it doesn’t have to–I’ve placed the decoder in the cab of a couple of RS3s because there just wasn’t room above the motor. The tougher trick is finding a good spot for the speaker(s). Most locomotives currently in production will leave a good spot for this, but many of my locomotives were purchased well before sound was much of a thing. I’ve crammed speakers in the long hood, the short hood, in the cab, on top of the decoder, you name it! A couple of times on some old Proto units (they filled every last inch of those shells with weight), I’ve had to take a hacksaw to the weight and carve out a piece of real-estate in the nose. I find that mounting the speakers to the frame assembly is more convenient and practical than mounting them inside the shell, but you can do either. Just make sure the speaker is sitting on something reasonably solid like a piece of the frame, or in some cases, a thick plank of styrene cut to go across the top of a truck. For attaching the speakers, I like to use 3M double-sided foam tape because it holds well while still enabling a little movement from the speaker so it doesn’t rattle its mount. The 3M tape is tough to remove if you want to change things, though, so I know others have sworn by servo tape.
Sound installations require a LOT of wires, so I’m careful not to make the wires too long, and I use liberal amounts of shrink tubing and electrical tape to keep the wires from making a rat’s nest inside the shell. I’ve found my wiring has gotten a lot neater over the course of a dozen installations, so expect a little trial-and-error here.
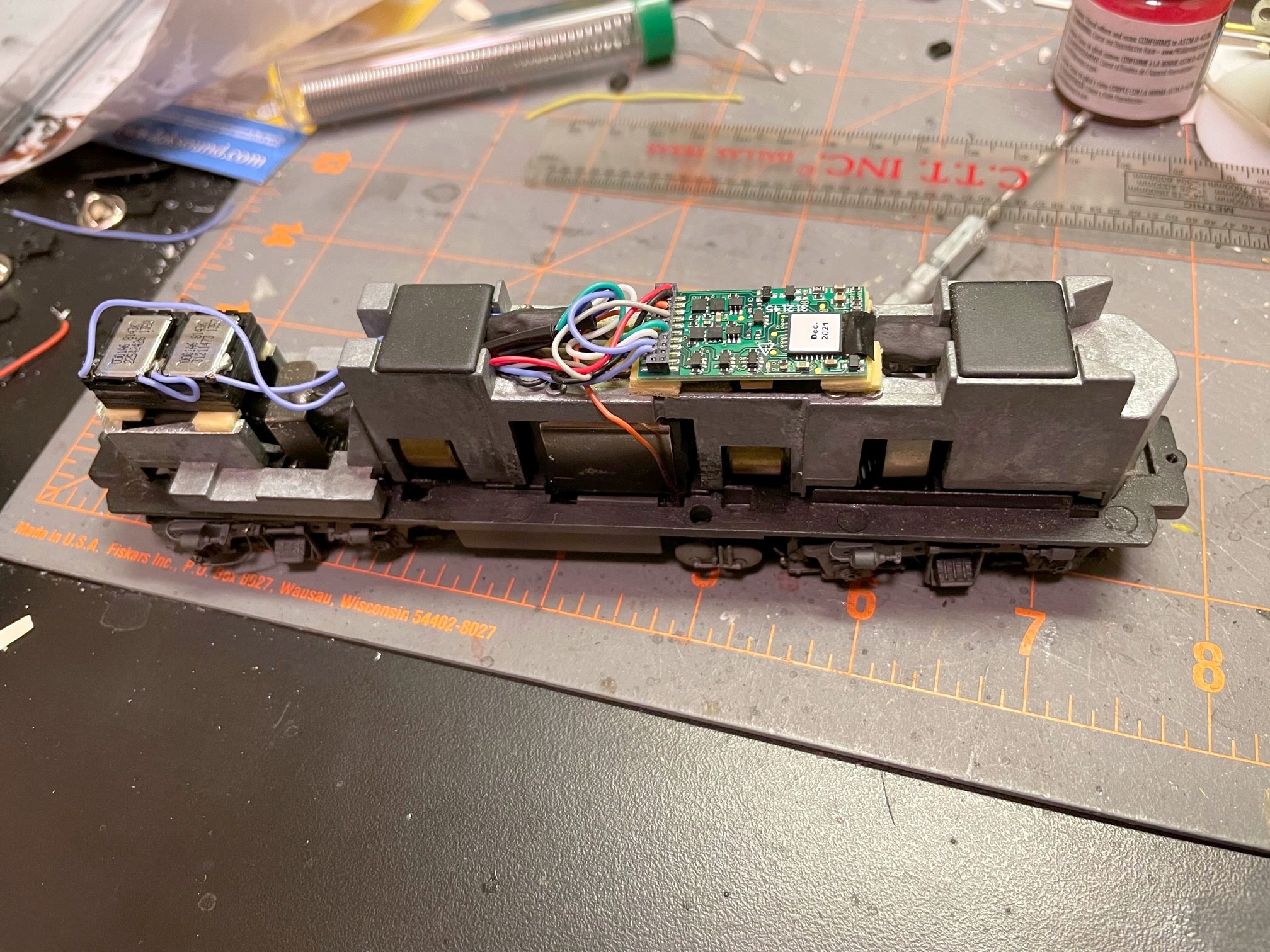
Basic mapping of a 21-pin connector for DCC (use at your own risk)
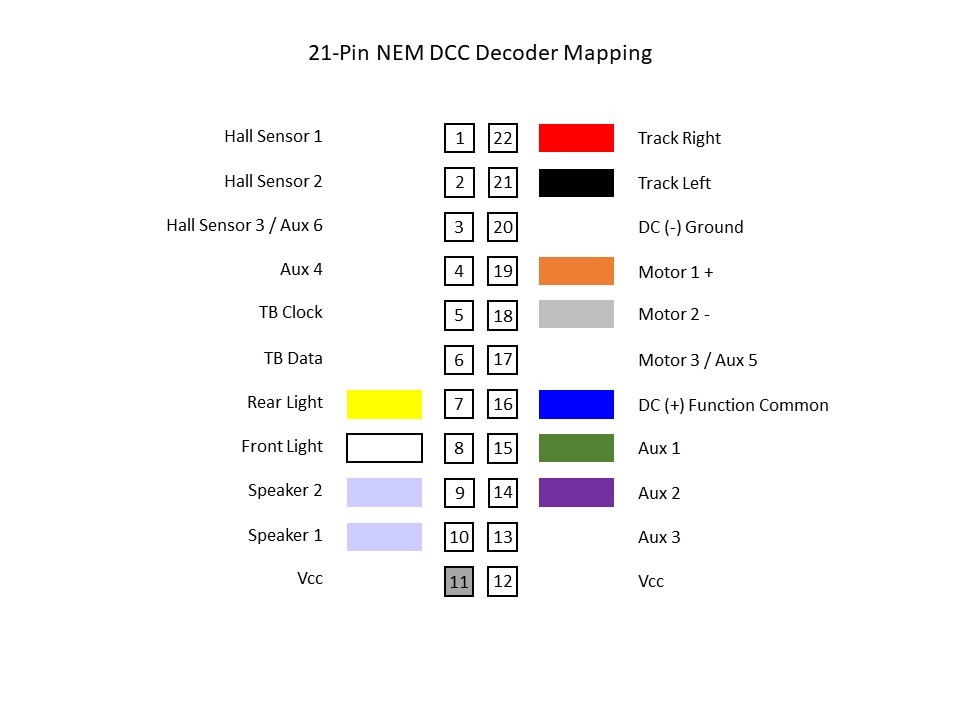
You can, indeed, hardwire a 21-pin decoder without a harness (but it ain’t fun or recommended). One of the downsides of the Soundtraxx Econami is it’s only offered in two sizes, the larger “plug-n-play” (ECO-PNP) board and the much smaller 21-pin version (ECO-21PNEM). The PNP is a drop fit for many locomotives, especially locomotives from the previous generation of factory DCC or “DCC ready” units. But it is kind-of long. The 21-pin is about 1/2 the footprint, so it’s the perfect size for smaller HO-scale locomotives where the PNP won’t fit, but… surprise, it needs a 21-pin harness which is only found in newer locomotives. I tried to buy a 21-pin harness, but they’re expensive enough that it effectively makes the Econami install the same price as a similarly sized, full-featured Tsunami 2 TSU-2200 series decoder. Hmm… could I hard-wire the 21-pin decoder? Turns out the answer is “yes,” but it’s definitely “off label” use that will probably void your warranty, and I would only do it in dire circumstances. For me, “dire” happened to be the cramped quarters of an old Proto 2000 GP7 and an Athearn/MDC RS3 (once I removed the screeching lemur). There are two tricks to this process: 1) know which pins do what. This was surprisingly difficult to figure out, and I ended up translating a diagram from German (the translated diagram is included for you here). 2) use solid wire that fits firmly into the socket to connect the wires. I bent the pin wire in an “L” shape, soldered it to the locomotive wires, and covered the wire-attached half of the “L” with a piece of small shrink tubing to keep it insulated from other nearby wires. This has worked great in 3 installs and has held up to >3 months of use! But again, not ideal… do this at your own risk.
Poor picture, but this shows the homemade pins connecting an Athearn RS3 to a 21-pin sound decoder
When in doubt, try 2 sugar cube speakers (and call me in the morning… no wait, don’t call). There are some real sound artists out there who have a lot of intelligent things to say about speakers… I am not one of them. If I had to boil down everything I read about speakers into 2 things it would be: 1) use the biggest speaker you can fit, and 2) use a baffle (the housing that goes behind a speaker). First-generation locomotive speakers were variations of the traditional paper cone design, but more recently, smart phones have ushered in a revolution in small speaker technology, and we benefit from tiny but impressive speakers nicknamed “sugar cube” speakers. Two sugar cube speakers take up about the same room as a traditional oval cone speaker, but a pair seem to provide clearer sound and slightly more bass, so I’ve settled on a pair of sugar cubes as my basic, minimum speaker requirement in most locomotives. I use the LokSound sugar cubes because they come with a nifty little baffle kit that includes options for a shallow or deep baffle and options to mount one or two speakers to the base. If they’ll fit, I like to pair the sugar cubes with the deep baffles on a single base, but the shallow baffles sound almost as good if you don’t have the room for the deeper sides. I’ve seen some 3D printed baffles to go with sugar cubes as well, and I’ll definitely be giving these a try soon.
Impedance mismatching is a thing, but it isn’t the end of the world. Impedance, a form of resistance, is measured in ohms like a resistor. Those real sound artists of whom I am not one have written a lot of great articles on impedance and why it’s good to match the impedance of the decoder to the impedance of the speaker. I can’t explain it, so I’ll take them at their word! A typical sound decoder impedance is around 8 ohms (like the Soundtraxx units I use) as are many speakers, including the sugar cubes. But wait, I remember from somewhere that if you run two identical resistors in series or parallel you change their resistance by either double (series) or half (parallel). No worries! unless you’re running your decoder at max volume, this is not likely to be an issue. For example, LokSound recommends using speakers between 4 and 32 ohms, so there is a range. Just stay safe in the 1/2 to 2x range and don’t get too crazy. For reference, I wire my 2 sugar cubes in series.
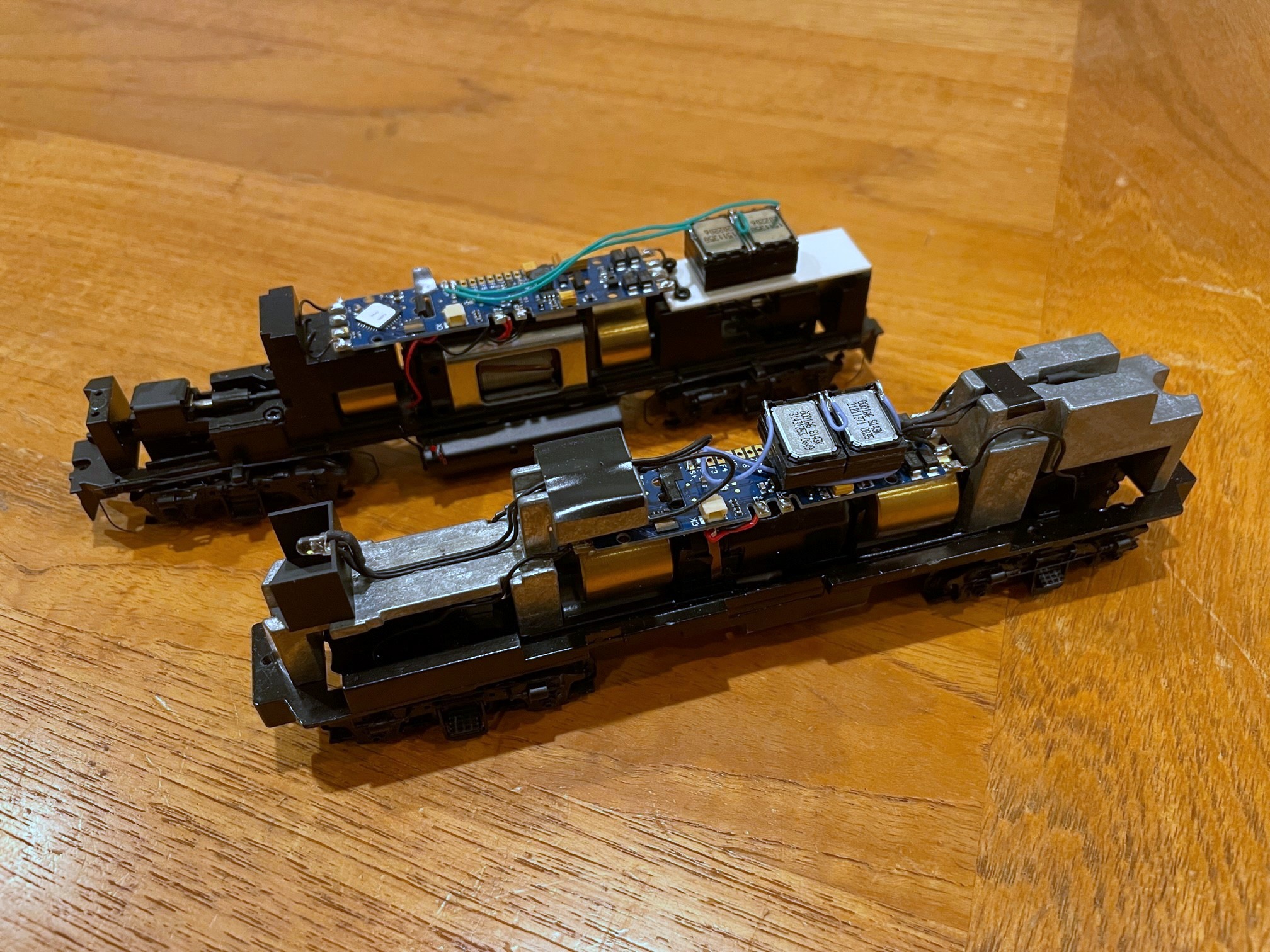
Tsunami 2 PNP installs on an Athearn Genesis GP38-2 (left) and Atlas GP38 (right)
When it comes to volume, less is more. Speaking of volume, I’ve found that on a layout with multiple sound locomotives, less is more on the sound volume. I usually set my master volume around 10-20% of the max output. I like to hear it in my ear at the volume I would expect to hear it if I were standing at the same vantage point (about 150 scale feet away) as an HO-scale person. I also take the time to tweak the levels of individual sounds to avoid letting any one locomotive dominate the room and to focus on the main sounds like the prime mover, horn, and bell. I keep the horn and bell pretty muted, though, as not everyone in the train room needs to know every time a train comes to a crossing. I set them just loud enough to be heard clearly over the prime mover by the crew initiating the horn or bell (to everyone else it’s an annoying distraction from their train).
Also, listen to the engine for a while and see what secondary sounds you like and don’t like and adjust them. For me, the poppet valves of the Econami decoders sound very loud and sharp and express themselves a bit too often, so I set the decoder to make these sounds more quiet and less frequent. On the full-featured Tsunami 2s, there are a myriad of secondary sounds. Most add well to the symphony, but I didn’t appreciate all of them. For example, the sound of a socket wrench is not something I’m used to hearing when train watching, so I turned the volume on this “extra” to zero for most of my locomotives. Other sounds like the radio chatter, doors opening, and toilet flushes I turned down so they’re barely audible. Again, I want the prime mover to shine and the background sounds to be in the background.
Configure each locomotive a little differently. Speaking of the extra sounds, decoders will come from the factory with a default setting for volumes and frequencies of sound. If you don’t tweak these, you may end up with decoders with “random sounds” being synchronized with other locomotives… not very realistic. I make sure each locomotive has a slightly different rate for sounds that can be rate-configured to avoid this and make the sound of each locomotive slightly unique.
JMRI Decoder Pro makes programming sooooo much easier. Decoder programming is all about configuration variables (CVs), and sound decoders have a LOT of things to configure! Soundtraxx uses a ton of CVs (like 500 for their Tsunami 2). LokSound has fewer CVs, but each CV can be used to configure multiple options by adding together the numbers associated with the options you want and entering the sum into the CV (it’s math, but at least it’s pretty simple math). You can skip a ton of this math and programming CV by CV by using JMRI’s Decoder Pro–it’s seriously awesome, and I never appreciated it more than when programming sound decoders! It turns programming into a set of selections on conveniently grouped tabs and uses plain language descriptions of variables instead of CV numbers. This is particularly helpful with Soundtraxx programming because each CV only controls one or two options, so its easy to separate them. It’s a little more complicated with LokSound because the decoders are “blank” and the sounds loaded separately after manufacture, usually by a dealer. They’re loaded as a “sound project” into the decoders “slots.” While there are some conventions on what sounds go into what slots, it’s really up to the person who designs and loads the sounds, so instead of sounds being conveniently labeled as “prime mover volume” and “horn” in Decoder Pro, you have to work with labels like “slot 1” and “slot 2”–still easier than manually programming each CV. JMRI and Decoder Pro are free software, and all you need is some kind of computer/DCC interface which most DCC systems offer. While you can use it with a stand alone programming track, I’ve found “programming on the main” to be a much better option for sound because you can hear every change in real-time.
When using lots of momentum, it’s important to know where the brake is–a bright red sticker makes it easy
Put the most used functions in F0-F6. Most newer decoders, including the Soundtraxx and LokSound decoders, allow you to “remap” the functions from the normal DCC convention to wherever they’re needed. Sound wasn’t a common thing when DCC conventions were set, so it’s not surprising that the conventions may not allow for convenient access to sounds. Also, the number of buttons on a throttle is limited, so you want to make sure the ones easiest to access (single push) are the ones you need most often. DCC is amazing, and I’m so grateful for those who made it happen for the hobby–they were brilliant! However, there is one unconscionable omission in DCC that I do not understand: braking. All decoders allow the programming of acceleration and deceleration (momentum), but some have no braking function so there’s no way to slow the locomotive down except to “e-stop” (ouch) or wait for the momentum to bleed off. The combination of momentum and a sound decoder is AWESOME, so I knew I wanted this and a way to easily control braking via the throttle. The sound decoders I’ve played with all have braking options, but the braking is implemented differently in each decoder. With enough tweaking, I was able program braking that feels right into both the Soundraxx decoders (Econami and Tsunami 2… not so much on the Tsunami in the Athearn GP38-2) and LokSound decoder. While sounds like couplers are cool, I decided easy access to a “brake” button was more important, so I had to remap my functions. As I use Digitrax UT4 throttles, all the important functions needed to be programmed into F0-F6, the only “one push” functions on the UT4. Here’s how I mapped them:
F0 – Headlight on/off (standard)
F1 – Bell (standard)
F2 – Horn (standard)
F3 – Short horn (standard on Soundtraxx)
F4 – Dynamic brakes (sound only, no braking action)
F5 – Light effects (gyralight if equipped, dimming if not)
F6 – Brake (complete with a nice stop-sign sticker on my throttles)
You need to play around to really make them sing. To get the most realistic sound out of a decoder, you need to really play around with it and make lots of tweaks (there’s a reason there are so many CVs). On a real locomotive, the sound is not tied to speed as much as load and demand. For the economy decoders like the Econamis, you get what you get, and the prime mover pitch is tied to the throttle setting. You can use function buttons to increase and lower the RPM sound, but who wants to have to control their throttle AND RPMs separately? Some might, not me. What you REALLY want is for the decoder to sense the load and other factors and change the pitch according to the load. The key to this is the decoder’s use of Back EMF (BEMF) which essentially allows the decoder to sense the load on the motor. With the LokSound decoders, the use of BEMF to control the prime mover sound appears to be native in the decoder’s function. For the Tsunami 2s, it took a bit more work to configure this, but it is SOOOO worth it! Soundtraxx calls this “Dynamic Digital Exhaust” (DDE), and it requires the tweaking of a few CVs, two to tell the decoder your idea of “low speed” and “moderate speed,” one to control the prime mover based on the difference between your throttle setting and current speed (this is where building in some accel/decel really helps), and one to tell it how sensitive to be to the BEMF.
By 1) adding in a good bit of momentum, 2) turning up the “speed differential” CV to full blast and 3)upping the BEMF sensitivity to about 30% of max, I get a locomotive that sounds very realistic to my ear. When I move it from idle, I crank the throttle up immediately to where I want the speed to be. The prime mover howls to life with a roar because it senses a difference in its current speed (zero) and the desired speed. The locomotive, still belching sound, then begins to creep slowly up to speed, and the prime mover quiets a lower level as the actual speed closes on the desired speed. After that, the BEMF helps it know if it’s under load or not, so it’ll drop back to near idle going downhill, and it will notch up if moving uphill, especially if its moving a lot of cars uphill with it–perfect!
Another tweak I highly recommend is the dynamic brake setting which can be done even on some of the economy decoders. For most model applications, you don’t actually want the application of dynamics to slow the train. You’re going to control the train speed with the throttle, and the “dynamics” are just ear candy as they’re presumably helping you keep the speed in check going down a grade. Soundtraxx has a CV you can select that will drop the engine sound to idle if the dynamic brakes are applied. I like this because when I’m heading down a grade with a loaded train, a single function button push allows me to drop the prime mover sounds to idle and bring up the dynamic brake whine while still moving the train at a realistic speed. Cool!
Speed matching is really important for the cool features. I’ve always been a “close enough” guy for DCC locomotive speed matching. This has served me just fine until now. I was so excited when I figured out how to use DDE to make my locomotives sound amazing in response to throttle inputs and loads, and then I put two of these amazing locomotives together in a consist. When just the the two of them were creeping along together downhill and their prime movers were screaming at “notch 8,” I knew something was wrong. Turns out, if locomotives aren’t perfectly speed matched, one is always pushing or shoving on the other. The BEMF in the decoder translates this as “load” and adjusts the sound accordingly which means notch 8 sounds for notch 1 action. I spent hours painstakingly speed matching locomotives to a single locomotive I picked as the “pacer” using 28-step tables and trim for each locomotive. This was time well spent as multiple locomotives sound far more realistic now that they’re not fighting each other.
Advanced consisting is a big help. Before sound, I used Digitrax’ “universal” (command-station) consisting almost exclusively. Now that I have sound-equipped locomotives, I’ve switched to “advanced consisting” (decoder-aided consisting). Advanced consisting has a couple really useful features. First, you can configure the locomotives on the ends of the consist to only use their headlights when the consist is moving in a particular direction–this is crucial for my layout where switching is common and the consist changes directions all the time. Also, you can configure most functions in any locomotive to respond to either the consist address or only the locomotive address. This allows you to pick a single locomotive in the consist to respond to horn and bell functions–I wish this could be configured to respond based on direction as well (the lead locomotive’s horn and bell are used and switch based on direction), but alas, this doesn’t seem to be a feature yet. Most importantly for sound, this allows me to program functions like dynamics and braking to respond to the consist address in ALL locomotives so they work as a team in both sound and braking.
Once you pick a manufacturer, stick with them. I’m not here to tell you which manufacturer to pick, but I will say, its a lot easier if you pick a manufacturer and stick with them! I heard this advice from others, and I now wholeheartedly agree! It’s far easier to make your fleet act in concert, especially when M.U.’d, if things like momentum and braking are implemented the same in all the decoders. While it may sound appealing to have a smorgasbord because you like one manufacturer’s Alco sound and another’s first-gen EMD sounds, it will limit your ability to implement consistent features and “feel” across the fleet. Having said this, I still use (and love) the one LokSound-equipped C420 I have even though everything else is Soundtraxx. Thankfully, the L&N train it powers is usually run by a single locomotive, so I just had to tweak it to feel and act more like the Soundtraxx equipped locos, but it doesn’t need to be a perfect match because it’s never M.U.’d.
My only LokSound decoder is in an Atlas C420 that runs solo
Every manufacturer has their pluses and minuses, so pick the features that work for your operations (aka “why I picked Soundtraxx”). You really can’t go wrong with the leading manufacturers, and you’ll find zealots and haters for each. They all do things differently, though, so ultimately you have to figure out what your priorities are. I hear great things about TCS WowSound, but I have no personal experience to share. I wanted to jump in, so I evaluated the LokSound and Soundtraxx locomotives I had on hand to see which I wanted to use on the fleet. When just listening to the sound, especially as it changed based on how I was operating the locomotive, I prefered the LokSound. However, when I began playing around with things like braking and tweaking CVs, I found the Soundtraxx was far more intuitive to configure, and now that I know how to use DDE in the Soundtraxx decoders, I’m able to get a lot of the same sound dynamics out of my Tsunami 2s that seem to be pre-programmed in the LokSound. I can live with complicated programming, so what it really came down to for me was one simple thing: Soundtraxx has a reasonably featured “economy” line that works for many of my locomotives. Interestingly, as I’ve gained experience, I’m still happy with the Econamis, but I will probably invest in full-fledged models from here on out because their extra features enhance my enjoyment enough to justify the extra cost. The Econamis will still have a home in B-units, mid-consist units, and units that only see service occasionally.
If you’ve stuck with this article to this point, good for you for listening to a rookie! I hope some of my learning points will help you as you make decisions and jump into the world of sound decoders. While I won’t encourage a battle of which manufacturer is best, I would encourage those of you with experience in this area to add some of your own lessons in the comments. If you’ve learned nothing else from this, I’ve hoped you’ve at least learned that it’s not a good idea to use a sound decoder that sounds like a screeching lemur.
You may remember Southern GP7 2187, a Proto GP7 I finished last summer. Well in addition to fixing the railings and steps for my 1970 timeframe (black and white instead of yellow), I decided to install sound. Now sound is something pretty new and intimidating to me, but after running a couple factory-equipped sound locomotives, it was tough to go back to no sound. I finally decided to just jump in! There are many great sound decoders out there, and everyone has their preference. I won’t claim to be an expert, but after doing some research, I decided to start with some Soundtraxx Econami decoders. As you might guess from the name, these are “budget” decoders that run about 2/3 the cost of a full-featured sound decoder from any manufacturer. The Econami is pretty basic, but it does have the key features I need, and it uses the same basic sounds as the more expensive Tsunami 2s. Best of all, the Econami Diesel version allows the user to select from a handful of prime movers including everything I need for my first-generation fleet: the Alco 244 for RS3s and the non-turbo EMD 567 for Fs, GP7s and GP9s.
Basic mapping of a 21-pin connector for DCC (use at your own risk)
Soundtraxx makes two versions of the diesel Econami, the larger ECO-PNP and the smaller 21-pin ECO-21PNEM. I picked up a couple ECO-PNPs, one of which was intended for 2187, but once I got the decoder, it was obvious that it wouldn’t fit without major modification to the large metal weight–I needed something smaller. After installing the PNPs in an RS3 (just barely) and an F3A, I decided I was happy with the sound produced by the Econami and a pair of mini cube speakers, so I looked to see if I could install the smaller 21-pin decoder in the GP7. The 21-pin arrangement is newer, and I was surprised at how tough it was to find a cheap 21 pin harness I could wire into the locomotive. You can find cheaper ones in Britain, but it was going to cost me an extra $20 to get one in the states–what’s the point of using the Econami if a simple harness was going to eat up all the savings?
Taking 8mm off the height of the weight in the nose of the Proto GP7 to make room for speakers
So, could I get the 21-pin Econami to work without a harness? While it was a little tough to find info, I finally figured out the mapping of the 21 pins (thankfully German shares some commonality with English…). I knew it wouldn’t be practical to solder directly into the decoder (the pin holes are tiny and close together), but I thought I might be able to shape the wires to act as pins, so I ordered up an ECO-21PNEM. What I found was I could tin the wires on the locomotive, cut the end so about 2mm of metal was exposed, and then carefully insert the wire into the correct pin hole. While the connection is not bulletproof, it’s snug enough that the wires don’t come out easily, and if you can push the wire in until the insulation is flush with the board, there’s little chance of a short. For the extra wires (e.g., speaker wires), I used 30 AWG stranded wire tinned with solder–I had to use a little extra solder to get a snug fit, so a 28 AWG wire would probably work as well. Once I verified everything worked, I used a piece of electrical tape to hold the wires down and in-place.
Using a 21-pin Econami decoder without a 21-pin harness
Now for the speaker. Unfortunately, I decided to use the large clear plastic blocks for the number boards and lights, so the little room that was left in the top of the shell was taken up. I decided the best course of action was to take the weight off and remove about 8mm of metal height from the nose section with a hacksaw. After filing the cut clean, I was ready to install the speakers. I’m using the 11 x 15mm cube speakers made by Loksound. You can find a lot of sources for speakers this size, but I love that the Loksound versions come with different baffle arrangements including both short and tall and a base to install two speakers side-by-side (my preference). I built a double baffle with the short walls using CA and connected the speakers in series (16 ohms impedence). Yes, the decoder is 8 ohms and the speakers are 16 ohms. My research leads me to believe this is not ideal but is acceptable as long as I don’t run the amp at max, which I don’t–if you have a good technical reason why this is not a good idea and will damage things in the long-run, please feel free to post a comment!
So, in the end, I was able to fit a sound decoder and two small speakers into the Proto GP7 with just a small, one-cut modification to the body weight, and I’m really happy with the sound! I’ve got a Soundtraxx Tsunami 2 EMD diesel decoder now as well, so I’ll do a comparison at some point and let you know how I think the Econami compares. For now, I’ll enjoy the chugging sounds of the EMD 567 and hauling coal hoppers interrupted occasionally by the chimes of a Nathan M5! St Charles is now a much louder place.